Важнейшую роль в обеспечении высокой регулярности и безопасности полетов играет четкость и надежность управления движения ВС. Однако традиционные способы УВД становятся недостаточно эффективными при большой интенсивности воздушного движения из-за ограниченных возможностей человека по управлению движением большого числа ВС.
Характер работы диспетчера принципиально не меняется, но ее напряженность резко возрастает, он уже не в состоянии справиться с огромным объемом информации, которая поступает к нему от большого числа ВС по различным каналам и в разной форме. Увеличение числа диспетчеров не решает задачи, так как при этом возникает новая проблема по координации их действий. Для упрощения и облегчения работы диспетчера его нужно освободить от функций сбора, хранения и обработки информации, оставив за ним лишь функцию принятия наиболее важных решений по УВД. В таком виде эта задача решается путем автоматизации процессов УВД на основе применения современных радиоэлектронных средств и вычислительной техники.
Структура АС УВД
АС УВД выполняет разнообразные функции по переработке большого объема информации и состоит из ряда отдельных комплексов и подсистем (рис.68):
— подсистема сбора информации ПСИ;
— подсистема связи и передачи информации ПСПИ;
— вычислительный комплекс ВК;
— подсистема отображения информации;
— подсистема связи с ВС ПСВС.
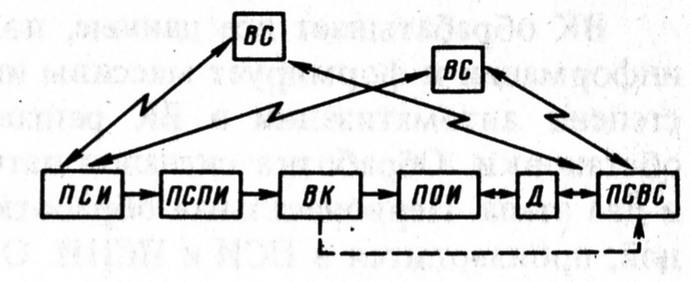
Рис. 68. Структурная схема АС УВД
Важным звеном АС УВД является диспетчер, замыкающий контур управления. В зависимости от вида системы и степени автоматизации каждая из подсистем может иметь различную структуру и функции, но для всех АС УВД эти подсистемы имеют общие задачи и отличительные признаки.
ПСИ включает датчики информации различных типов, позволяющие измерять координаты ВС, получать метеоинформацию, сообщения из соседних центров УВД. Информация, используемая в процессе УВД, подразделяется на статическую и динамическую. Статическая информация не меняется работы системы и включает параметры ВС и трасс. Она вводиться в ВК на этапе подготовки системы к эксплуатации, но при необходимости может корректироваться и в процессе эксплуатации. К динамической, т.е. изменяющейся, информации относятся координаты ВС, высота полета, бортовой номер или номер рейса, остаток топлива, сообщения об аварийной ситуации или отказе радиосредств, метеорологические данные. Все эти данные должны вводиться в систему автоматически в течение всего времени работы, т.е. по существу непрерывно.
Промежуточное положение между статической и динамической информацией занимают планы полетов, так как они могут корректироваться в процессе полета. План полета должен содержать номер ВС, номер трассы, время вылета, пролета контрольных пунктов и прибытия в пункт назначения, запас топлива и сведения о наличии на борту ответчика. Оперативно должны вводиться в систему планы внерейсовых полетов, передаваемых из других центров УВД. Планы полетов для рейсов, выполняемых по расписанию, вводятся заранее и корректируются относительно редко. Сигналы от отдельных датчиков ПСИ имеют различную природу. Некоторые сигналы представлены в аналоговой, другие — в дискретной форме. При этом способы кодирования дискретных сигналов могут быть разными. Для преобразования всех, поступающих от ПСИ сигналов, к единому виду, пригодному для ввода в ВК служит подсистема связи и передачи информации ПСПИ. На выходе этой подсистемы вся информация представляется в цифровых кодах, с которыми оперирует ЦВМ ВК. Дополнительно ПСПИ обеспечивает связь персонала центра управления со всеми взаимодействующими службами.
ВК обрабатывает все данные, поступающие от различных датчиков и формируют массивы информации для ПОИ. При высокой степени автоматизации в ВК решаются и задачи анализа воздушной обстановки. Обработка сигналов датчиков происходит в два этапа. Первоначальная обработка информации, называемая первичной, производится в ПСИ и ПСПИ. Основная цель этой обработки — очистка сигналов от помех и получение данных в форме машинных кодов. Второй этап осуществляется в ВК и называется вторичной обработкой, основная цель которой — получение возможно более полных данных о траекториях движения всех ВС, находящихся в зоне управления.
ПОИ предназначена для отображения воздушной обстановки в наиболее удобной для восприятия форме. В АС УВД координатная информация отображается в графической, т.е. аналоговой, форме, а дополнительная — в цифровой (рис. 69).
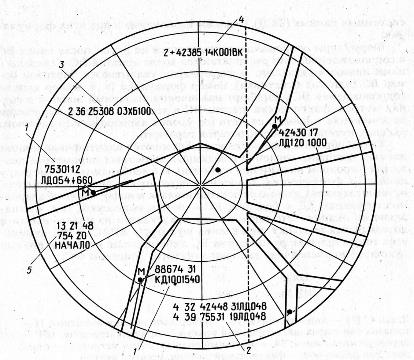
Рис. 69. Совмещенный план-индикатор
1 — формуляры сопровождения; 2 — формуляр ожидания прилетающего ВС; 3 — формуляр ожидания вылетающего ВС; 4 — табличный формуляр; 5 — таблица системных данных
С помощью ПОИ решаются также задачи активного взаимодействия диспетчера с ВК. ПСВС обеспечивает передачу команд управления на ВС, обмен сообщениями между экипажами ВС и службой УВД, а также получение и ввод в ВК некоторых данных с борта ВС.
Классификация АС УВД
АС УВД классифицируются по ряду признаков. Основными из них являются область применения, назначение, степень автоматизации (номенклатура автоматизированных функций) и способ получения информации о параметрах движения ВС.
В зависимости от сферы применения АС УВД различают:
По назначению АС УВД разделяются на:
— АС планирования воздушного движения (АС ПВД);
— АС непосредственного управления воздушным движением (АС УВД);
— совмещенные (АС ПВД и УВД);
— АС управления наземным движением.
По степени автоматизации АС УВД разделяются::
— системы малой (частичной) автоматизации (МАСУВД);
— системы 1-го уровня автоматизации;
— системы 2-го уровня автоматизации;
— системы 3-го уровня автоматизации.
По способу получения координатной информации АС УВД делят:
— системы радиолокационного контроля;
— системы процедурного контроля .
Эксплуатационно-технические характеристики (ЭТХ) АС УВД
Эксплуатационно-техническими характеристиками принято называть показатели, отображающие сведения о сфере применения, функциях, Эксплуатационно-технических возможностях и качестве функционирования АС УВД. ЭТХ основных типов АС УВД, эксплуатируемых в Росси, приведены в таблице 14.
| Показатели | Типы АС УВД | ||||||
| Аэродромные | Аэроузловые | Районные | |||||
| “Старт” | “Теркас” Мин. Воды | “Теркас” Киев | “Спектр” | “Теркас” Москва | “Теркас” Москва | “Трасса” | “Стрела” |
| Размеры зоны управления, тыс. км 2 | |||||||
| Число секторов управления | |||||||
| подхода | — | — | — | ||||
| круга | — | — | — | ||||
| посадки | — | — | — | — | — | — | |
| старта | — | — | — | — | — | — | — |
| руления | — | — | — | — | — | — | — |
| Число р/локационных позиций | |||||||
| Число ВС, сопровождаемых системой ПРЛС | |||||||
| Число ВС, сопровождаемых системой ВРЛ | — | — | — | — | — | ||
| Число обрабатываемых планов полетов: | |||||||
| стандартных | — | — | |||||
| суточных | — | — | |||||
| текущих | — | — |
Дата добавления: 2017-01-08 ; просмотров: 9428 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Автоматизированные системы УВД (АС УВД)
Важнейшую роль в обеспечении высокой регулярности и безопасности полетов играет четкость и надежность управления движения ВС. Однако традиционные способы УВД становятся недостаточно эффективными при большой интенсивности воздушного движения из-за ограниченных возможностей человека по управлению движением большого числа ВС.
Характер работы диспетчера принципиально не меняется, но ее напряженность резко возрастает, он уже не в состоянии справиться с огромным объемом информации, которая поступает к нему от большого числа ВС по различным каналам и в разной форме. Увеличение числа диспетчеров не решает задачи, так как при этом возникает новая проблема по координации их действий. Для упрощения и облегчения работы диспетчера его нужно освободить от функций сбора, хранения и обработки информации, оставив за ним лишь функцию принятия наиболее важных решений по УВД. В таком виде эта задача решается путем автоматизации процессов УВД на основе применения современных радиоэлектронных средств и вычислительной техники.
Структура АС УВД
АС УВД выполняет разнообразные функции по переработке большого объема информации и состоит из ряда отдельных комплексов и подсистем (рис.68):
- — подсистема сбора информации ПСИ;
- — подсистема связи и передачи информации ПСПИ;
- — вычислительный комплекс ВК;
- — подсистема отображения информации;
- — подсистема связи с ВС ПСВС.

Рис. 68. Структурная схема АС УВД
Важным звеном АС УВД является диспетчер, замыкающий контур управления. В зависимости от вида системы и степени автоматизации каждая из подсистем может иметь различную структуру и функции, но для всех АС УВД эти подсистемы имеют общие задачи и отличительные признаки.
ПСИ включает датчики информации различных типов, позволяющие измерять координаты ВС, получать метеоинформацию, сообщения из соседних центров УВД. Информация, используемая в процессе УВД, подразделяется на статическую и динамическую. Статическая информация не меняется работы системы и включает параметры ВС и трасс. Она вводиться в ВК на этапе подготовки системы к эксплуатации, но при необходимости может корректироваться и в процессе эксплуатации. К динамической, т.е. изменяющейся, информации относятся координаты ВС, высота полета, бортовой номер или номер рейса, остаток топлива, сообщения об аварийной ситуации или отказе радиосредств, метеорологические данные. Все эти данные должны вводиться в систему автоматически в течение всего времени работы, т.е. по существу непрерывно.
Промежуточное положение между статической и динамической информацией занимают планы полетов, так как они могут корректироваться в процессе полета. План полета должен содержать номер ВС, номер трассы, время вылета, пролета контрольных пунктов и прибытия в пункт назначения, запас топлива и сведения о наличии на борту ответчика. Оперативно должны вводиться в систему планы внерейсовых полетов, передаваемых из других центров УВД. Планы полетов для рейсов, выполняемых по расписанию, вводятся заранее и корректируются относительно редко. Сигналы от отдельных датчиков ПСИ имеют различную природу. Некоторые сигналы представлены в аналоговой, другие — в дискретной форме. При этом способы кодирования дискретных сигналов могут быть разными. Для преобразования всех, поступающих от ПСИ сигналов, к единому виду, пригодному для ввода в ВК служит подсистема связи и передачи информации ПСПИ. На выходе этой подсистемы вся информация представляется в цифровых кодах, с которыми оперирует ЦВМ ВК. Дополнительно ПСПИ обеспечивает связь персонала центра управления со всеми взаимодействующими службами.
ВК обрабатывает все данные, поступающие от различных датчиков и формируют массивы информации для ПОИ. При высокой степени автоматизации в ВК решаются и задачи анализа воздушной обстановки. Обработка сигналов датчиков происходит в два этапа. Первоначальная обработка информации, называемая первичной, производится в ПСИ и ПСПИ. Основная цель этой обработки — очистка сигналов от помех и получение данных в форме машинных кодов. Второй этап осуществляется в ВК и называется вторичной обработкой, основная цель которой — получение возможно более полных данных о траекториях движения всех ВС, находящихся в зоне управления.
ПОИ предназначена для отображения воздушной обстановки в наиболее удобной для восприятия форме. В АС УВД координатная информация отображается в графической, т.е. аналоговой, форме, а дополнительная — в цифровой (рис. 69).

Рис. 69. Совмещенный план-индикатор
1 — формуляры сопровождения; 2 — формуляр ожидания прилетающего ВС; 3 — формуляр ожидания вылетающего ВС; 4 — табличный формуляр; 5 — таблица системных данных
С помощью ПОИ решаются также задачи активного взаимодействия диспетчера с ВК. ПСВС обеспечивает передачу команд управления на ВС, обмен сообщениями между экипажами ВС и службой УВД, а также получение и ввод в ВК некоторых данных с борта ВС.
Классификация АС УВД
АС УВД классифицируются по ряду признаков. Основными из них являются область применения, назначение, степень автоматизации (номенклатура автоматизированных функций) и способ получения информации о параметрах движения ВС.
В зависимости от сферы применения АС УВД различают:
- — трассовые (районные);
- — аэродромные;
- — аэроузловые.
По назначению АС УВД разделяются на:
- — АС планирования воздушного движения (АС ПВД);
- — АС непосредственного управления воздушным движением (АС УВД);
- — совмещенные (АС ПВД и УВД);
- — АС управления наземным движением.
По степени автоматизации АС УВД разделяются::
- — системы малой (частичной) автоматизации (МАСУВД);
- — системы 1-го уровня автоматизации;
- — системы 2-го уровня автоматизации;
- — системы 3-го уровня автоматизации.
По способу получения координатной информации АС УВД делят:
— системы радиолокационного контроля;
— системы процедурного контроля .
Эксплуатационно-технические характеристики (ЭТХ) АС УВД
Эксплуатационно-техническими характеристиками принято называть показатели, отображающие сведения о сфере применения, функциях, Эксплуатационно-технических возможностях и качестве функционирования АС УВД. ЭТХ основных типов АС УВД, эксплуатируемых в Росси, приведены в таблице 14.
АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ
Основные направления развития средств автоматизации управления воздушным движением
Современные автоматизированные системы управления воздушным движением (АС УВД) за последнее десятилетие претерпели значительные изменения. Появились новые функции (TP, SYSCO, MTCD, MONA), а вместе с ними новые возможности диспетчера УВД, которых ранее у него не было. Наиболее существенным изменением АС УВД нового поколения, по всей видимости, является появление такой функции, как прогнозирование траекторий TP (Trajectory Prediction). Эта функция для каждого ВС обеспечивает расчет так называемой 40-траектории, т. е. прогнозируемой четырехмерной траектории движения ВС, тремя измерениями которой является пространственное положение (широта, долгота, высота), а четвертым измерением является время. 40-траектория описывается совокупностью 40-точек и определяет движение ВС в пространстве и во времени.
Появление 40-траекторий дало возможность разработать функцию MTCD (Medium-Term Conflict Detection) — обнаружение среднесрочных конфликтных ситуаций на глубине прогноза 0—60 минут и, при необходимости, больше. Кроме этого, 40-траектория позволяет возложить на АС УВД автоматический контроль за выдерживанием заданной диспетчером траектории. Задачу контроля осуществляет функция MONA (Monitoring Aids) — контроль соответствия и напоминания. Основное назначение функции MTCD — планирование бесконфликтного движения, то есть планирование бесконфликтных 40-траекторий движения ВС.
Основное назначение функции MONA — автоматический контроль выдерживания запланированных 40-траекторий ВС и напоминания о необходимости выполнения диспетчером определенных действий. Функции MTCD и MONA дают диспетчеру совершенно новые возможности, которых у него не было в АС УВД прежних поколений, и существенным образом меняют концепцию управления воздушным движением. Теперь диспетчер УВД не просто выявляет конфликты за несколько минут до их возникновения и разрешает их, как это было в системах АС УВД прежних поколений. Теперь диспетчер выявляет возможные конфликты значительно раньше, после чего планирует бесконфликтное движение, а АС УВД автоматически контролирует выполнение экипажами бесконфликтного плана.
Новые функции требуют от диспетчера УВД дополнительных вводов в АС УВД, таких, например, как ввод заданной высоты и высоты передачи в смежный сектор УВД. Однако в конечном итоге, несмотря на дополнительные вводы, новые функции увеличивают возможности диспетчера, обеспечивая повышение пропускной способности элементов воздушного пространства и повышение безопасности воздушного движения.
Функция SYSCO (System Supported Coordination) — координация движения ВС, обеспечивает автоматизацию процесса координации и передачи управления ВС между центрами ОВД, автоматизацию процедур согласования условий передачи ВС в смежный диспетчерский пункт и приема ВС из смежного диспетчерского пункта. При высокой интенсивности воздушного движения эта функция существенно снижает загруженность диспетчера рутинными ручными операциями, обеспечивая тем самым повышение пропускной способности диспетчера УВД и безопасности воздушного движения.
По оценке Евроконтроля внедрение таких функций, как TP, MTCD, MONA и SYSCO, обеспечивает повышение пропускной способности секторов на 15 % — в верхнем воздушном пространстве, на 10 % — в нижнем воздушном пространстве, а также повышение безопасности воздушного движения в два раза.
В состав современных АС УВД, как правило, входят:
- — комплекс средств автоматизации управления воздушным движением (КСАУВД);
- — комплекс средств автоматизации планирования использования воздушного пространства (КСА ПИВП);
- — комплекс средств автоматизации аэродромных командно-диспетчерских пунктов (КСА АКДП);
- — подсистема технического управления и контроля (ПС ТУК);
- — подсистема речевой связи (ПСРС);
- — комплекс средств передачи информации (КСПИ);
- — комплекс средств автоматизации метеорологического обеспечения (КСА МЕТЕО);
- — комплекс обеспечения справочной информацией (КОСИ);
- — комплексный системный тренажер (КСТ);
- — средства единого времени (СЕВ);
- — комплект эксплуатационной документации на систему;
В КСА УВД должны быть автоматизированы следующие основные процессы:
— прием, обработка и отображение информации о воздушной обстановке (информации наблюдения);
- — прием, обработка, отображение и рассылка плановой информации;
- — прием и отображение метеорологической информации;
- — анализ информации о текущей и прогнозируемой воздушной обстановке на основе информации наблюдения и планов полетов. Автоматизированное обнаружение среднесрочных конфликтов;
- — отображение информации о текущей и прогнозируемой воздушной обстановке, информации планов полетов, метеорологической информации и информации об ограничениях воздушного пространства;
- — резервная обработка и отображение информации наблюдения («by-pass»);
- — документирование и воспроизведение информации, обрабатываемой комплексом, включая ввод информации с рабочих мест диспетчеров УВД;
- — информационная поддержка расчета сборов за аэронавигационное обслуживание;
- — взаимодействие с КСА ПИВП и КСА АКДП;
- — взаимодействие со смежными АС УВД (по протоколу OLDI);
- — взаимодействие с ведомственными КСА и АСУ (автоматизированными системами управления);
- — автоматизированное управление заходом на посадку и вылетом AMAN/DMAN с целью оптимизации порядка взлетов/посадок;
- — техническое управление и контроль программных и технических средств комплекса.
В КСА ПИВП должны быть автоматизированы следующие основные процессы:
- — сбор, обработка, хранение и ведение аэронавигационной и справочной информации, необходимых для решения задач планирования ИВП.
- — сбор/получение, обработка, хранение и ведение планов регулярных (по расписанию) полетов ВС, поступающих от авиакомпаний ВС и из главного центра (ГЦ) единой системы (ЕС) ОрВД.
- — сбор, обработка, хранение и ведение планов полетов вне расписания:
- • полетов ВС по маршрутам ОВД — поступающих из ГЦ ЕС ОрВД;
- • полетов ВС, проходящих полностью или частично вне маршрутов ОВД, аэродромных полетов, планов ИВП на другие виды деятельности по ИВП — поступающих от пользователей воздушного пространства и взаимодействующих органов ОВД;
- — формирование и ведение плана ИВП зоны ЕС ОрВД.
- — формирование, передача и синхронизация плана аэропорта на АКДП и на выносные диспетчерские пульты;
- — сбор/получение и обработка информации о ходе выполнения плана ИВП, доведение изменений к плану, а также сообщений тактического планирования ИВП до органов ОВД (управления полетами) пользователей воздушного пространства зоны ЕС ОрВД.
- — документирование и воспроизведение информации, обрабатываемой комплексом;
- — взаимодействие с КСА УВД по плановой и аэронавигационной информации, информации по ограничениям ИВП, а также информации о фактическом выполнении планов полетов;
- — взаимодействие с КСА УВД по приему текущей информации наблюдения;
- — взаимодействие по плановой, аэронавигационной и справочной информации с органами ПВО, ведомственными АСУ и КСА, системой приема плановой информации по сети Интернет (СППИ) своей зоны ОрВД;
- — техническое управление и контроль функционирования комплекса.
В КСА АКДП должны быть автоматизированы следующие основные процессы:
- — прием, обработка и отображение информации наблюдения от КСА УВД и аэродромных систем, комплексов и средств;
- — прием, обработка, хранение, отображение и рассылка плановой информации;
- — прием, обработка и отображение метеорологической информации от аэродромных автоматизированных информационных систем (АИС) и КСА МЕТЕО;
- — анализ информации о текущей и прогнозируемой воздушной обстановке;
- — отображение информации о текущей и прогнозируемой воздушной обстановке, информации планов полетов, метеорологической информации и информации об ограничениях воздушного пространства;
- — сбор, обработка и отображение справочной информации;
- — техническое управление и контроль функционирования;
- — документирование и воспроизведение информации, обрабатываемой комплексом, включая ввод информации с рабочих мест диспетчеров УВД и системного инженера;
- — взаимодействие со смежными аэродромными и аэропортовыми автоматизированными системами, комплексами и средствами;
- — контроль безопасности выполнения взлетов и посадок ВС.
В ПС ТУК должны быть автоматизированы следующие основные процессы:
- — непрерывный контроль режимов работы и технического состояния элементов (комплексов, средств, источников информации, каналов передачи данных и т. п.) АС УВД.
- — управление режимами работы, техническим состоянием и конфигурацией элементов (комплексов, средств, источников информации и т. п.) АС УВД.
- — формирование и отображение в согласованной форме информации функционального контроля;
- — ведение системного журнала (журнала событий);
- — диагностирование и тестирование средств АС УВД в автономном режиме;
- — документирование и воспроизведение информации, обрабатываемой ПС ТУК (подсистемой технического управления и контроля), включая ввод информации с рабочих мест эксплуатационного (инженерно-технического) персонала;
- — отображение информации о воздушной обстановке;
- — возможность выбора (подключения, отключения) введенных в систему источников радиолокационной информации;
- — возможность корректировки (бланкирования) зон обработки радиолокационных полей в зависимости от источников радиолокационных информации и конфигурации трасс;
- — обеспечение единым временем АС УВД;
- — администрирование, включая администрирование базы данных, и формирование отчетов;
- — возможность экспорта данных ТУК внешним потребителям;
- — обеспечение справочной информацией (при отсутствии автономных средств справочной информации).
Средства ПСРС должны обеспечивать:
- — двухстороннюю радиосвязь в диапазонах ОВЧ и УВЧ между диспетчерами центра КСА УВД и экипажами ВС в телефонном или громкоговорящем режиме, двухстороннюю ОВЧ и ВЧ радиосвязь «земля- земля» с подвижными объектами, а также организацию прослушивания радиоканалов «ВОЛМЕТ» и «АТИС» на рабочих местах диспетчеров УВД;
- — внутрицентровую оперативно-командную телефонную связь диспетчеров, а также инженерно-технического персонала системы;
- — внешнюю оперативно-командную телефонную связь диспетчеров и инженерно-технического персонала с абонентами аэропорта базирования;
- — внешнюю оперативно-командную телефонную связь с удаленными объектами взаимодействия АС УВД (смежные районные центры, диспетчерские пункты подхода, аэропорты и аэродромы зоны и т. п.);
- — вывод документирования речевой информации для регистрации на долговременном носителе.
КСПИ должен обеспечивать обмен речевой и телекодовой информацией (данными) между центром АС ОрВД с ее периферийными объектами, с внешними системами и комплексами УВД, ПИВП/ПВД, АИС и т. п.
В КСА МЕТЕО должны быть автоматизированы следующие основные процессы:
— прием метеорологической информации, поступающей от АИС (автоматизированных информационных систем), например, АИС «Метео Сервер»;
- — формирование и выдачу метеорологических сообщений для КСА ПИВП, КСА УВД и КСА АКДП;
- — отображение метеорологической информации на автономных средствах отображения для персонала УВД;
- — формирование предупреждений о фактическом или прогнозируемом возникновении опасных для полетов авиации явлений погоды.
В КОСИ (комплексе обеспечения справочной информацией) должны быть автоматизированы процессы ввода, хранения, корректировки и представления справочной информации эксплуатационному (диспетчерскому и инженерно-техническому) персоналу АС УВД.
В КСТ должны быть автоматизированы решения следующих основных задач:
- — имитация выполнения основных технологических процессов планирования ИВП и управления воздушным движением, применяемых на рабочих местах РДЦ, АДЦ и АКДП;
- — обеспечение обучения инженерно-технического персонала процедурам эксплуатации технических средств АС УВД.